| (rev. May 14, 2010) The plan that was outlined
in the box shown below is starting to seem like too much work. Last night
I thought of an alternate plan which would require fewer optical isolators
(just 3 rather than 6) and would require no further changes to the existing
robot or brain board 2! One would add circuits and a battery to an expansion
board available from microchip.
In this scenario the PIC on the brain board would continue
to control the robot as before; however, the student program would be run
in a second PIC on an add-on board. The add-on board would have it's own
power supply and would connect to the brain board through optical isolators
so it would in fact be completely electrically isolated from the robot!
The PIC on the brain board v2 would have just one reliability
feature enabled; the watchdog timer would be enabled. This would mean that
if the program running on this PIC stopped executing the code in the normal
way the watchdog timer would time out causing the PIC to reset and so reenter
a known state. This would occur in the order of 30 to 40 ms.
I have found that if I enable the brownout reset the resets
occur to frequently with the existing setup. The brownout circuit must
be sensitive to conditions that actually only rarely cause the PIC fail.
This can be tolerated except when it is important not to lose any values
stored in RAM. On reset all values in RAM are lost. This is not important
with regard to the low level control close to the hardware as long as the
condition does not persist for too long. It is only on the order of 30
ms I think this would hardly be noticeable as long as it does not happen
too frequently.
At a higher level one must maintain flags and other variables
regarding if the robot has recently seen a line off to the right or the
left. In the case of a maze one would keep an internal map of the maze.
No resets can be tolerated. If the higher functionality was maintained
in a PIC completely isolated from the electric EMI of the motors is should
be robust and reliable.
(rev. May 18, 2010)
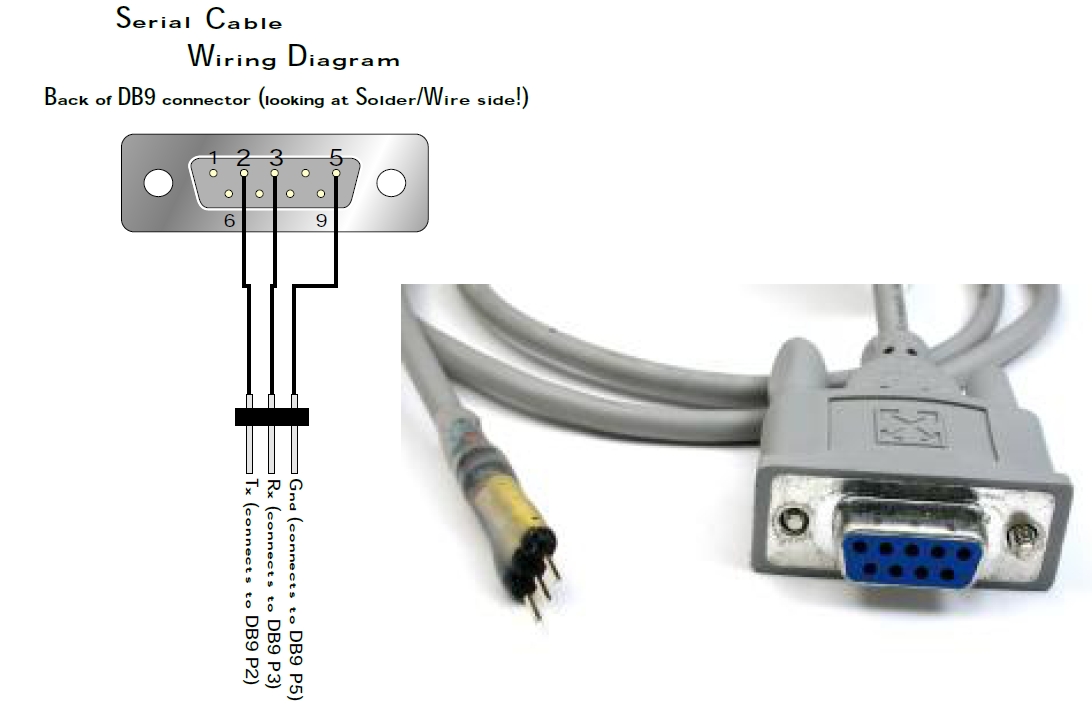
Having looked at using the I2C interface
or the RS232 interface I have decided it would be simpler to use
the RS232 interface although this will require the addition of one
jumper to the version 2 brain board.
Using the I2C interface would not have
required any change to the version 2 brain board; however, it would be
much more complex to build an isolation circuit given the bi-directional
nature of the I2C interface lines.
From a softward point of view the RS232 seems more
straight forward. The purpose of I2C is to allow a microcontroller
to talk to several peripherals over the same two line interface. That adds
complexity that is not required here. For example the I2C
message includes an address so the specified peripheral will respond. The
microcontroller is the master and the peripherals are slaves (they only
send information reqested).
The intent of RS232 is more our actual situation.
We will have two microcontrollers talking to each other peer to peer. RS232
will allow messages to be going in both directions at the same time. This
will allow the software to be simpler. The complication is the built in
level shifting interface intended to let the brain board talk to a PC.
That can be worked around. For example the expansion board can be removed
when the diagnostic program is being run on the robot. |